MIT Researchers Build Robotic Hand That Can Walk Away, Literally
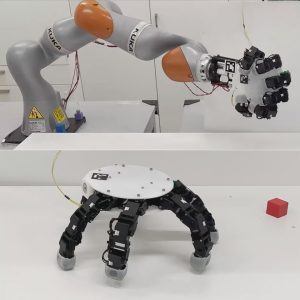
Researchers at EPFL in Lausanne, in partnership with MIT, have developed a cutting-edge robotic hand that far outperforms typical fixed arm setups. This device can just drop off, walk around on its own across various terrains, pick up objects, and return to its original spot with ease, all while accomplishing jobs that other robotic systems fail to complete.
Engineers created two versions: a 5-finger and a 6-finger model, both with a large rounded palm about 16 cm wide. The fingers are evenly distributed in a circle around the palmar surface, thus no matter whatever angle you look at the hand from, it appears the same. Each finger is engineered to flex and move backwards and forwards, more than compensating for the limited reach of a typical human hand. The hand’s flawless symmetry allows it to grab objects without mucking them up, and it can easily handle up to 33 of the most typical human grasp positions.
Sale

ELEGOO UNO R3 Smart Robot Car Kit V4 for Arduino Robotics for Kids Ages 8-12 12-16 STEM Science Kits…
- ELEGOO Smart Robot Car: An educational STEM kit beginners (kids) to get hands-on experience about programming, electronics assembling and robotics…
- Complete Package: Contains 24 kinds of module parts including obstacle avoidance, line tracing module, infrared remote control and also you can…
- Easy to Assemble: All the module interface has been modified with XH2. 54 ports as to make it much easier and convenient to assemble the car and…
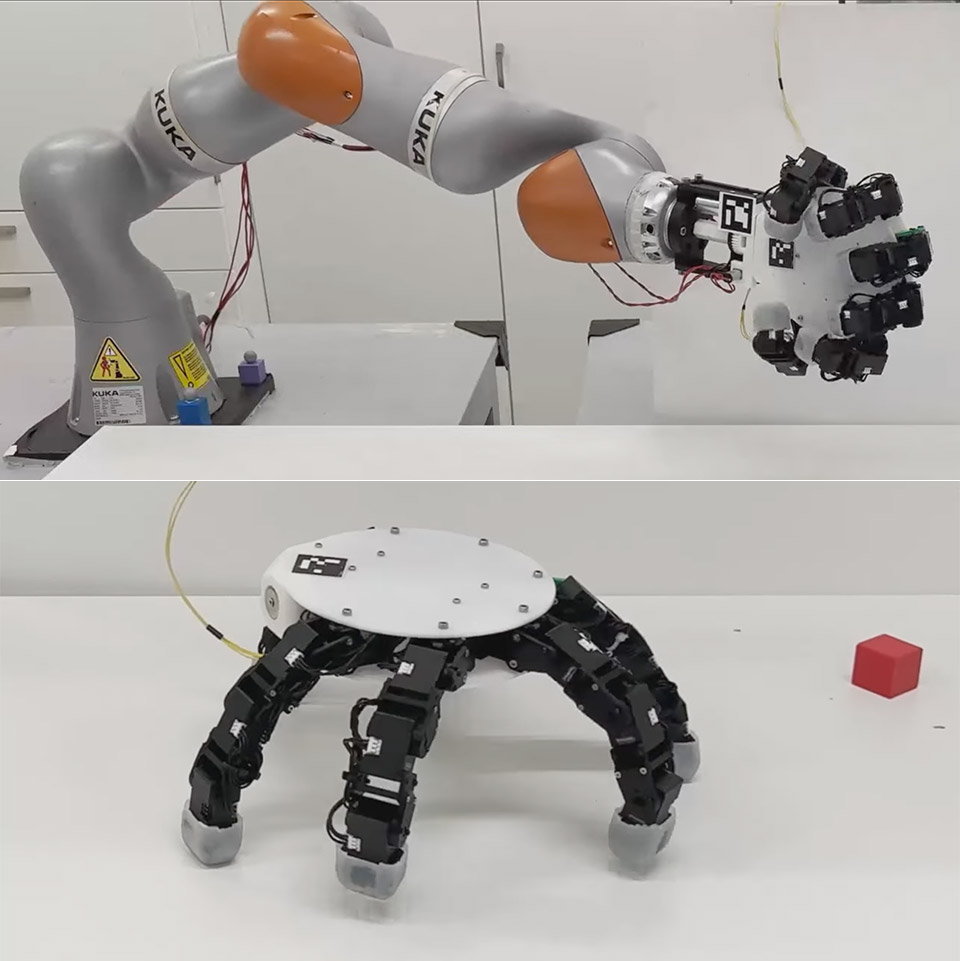
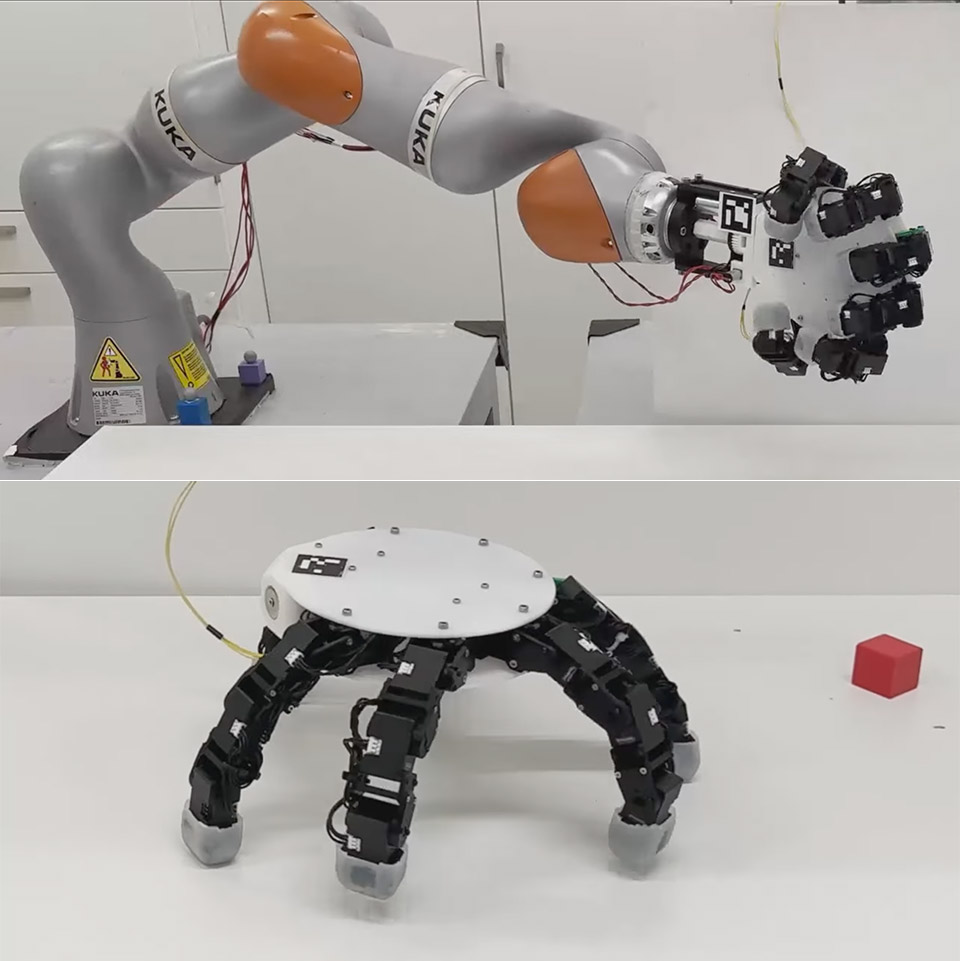
Connecting it to a robotic arm is simple; simply insert a motor-driven screw and some powerful neodymium magnets, and you’re ready to go. When you’re ready to let the hand go solo, it lowers off the arm, allowing the coordinated finger movements to take control. The fingers appear to work as legs, with a rhythmical push/pull motion that keeps the palm firm and going forward.
The movement of these fingers has been fine-tuned using a combination of genetic algorithms and central pattern generators; these two techniques assist get the hand working in a smooth, flowing manner. In practice, the hand can move at a reasonable pace across a level tabletop, covering lengths that would rival even the best robotic arm. We’ve even seen it detach itself, go over to a target, pick up a block or cube, and occasionally collect a few items on the way back.
This hand differs from other designs in that it deviates from the traditional human hand layout with one thumb and four fingers all grouped together on one side. That works well for many jobs, but when there isn’t enough space or when materials are strewn about, it becomes difficult; however, this design flips that on its head, since the fingers are utilized for a variety of functions, from picking things up to assisting the hand in moving around. The hand may easily switch between duties, such as keeping something in position or moving ahead.
[Source]
MIT Researchers Build Robotic Hand That Can Walk Away, Literally
#MIT #Researchers #Build #Robotic #Hand #Walk #Literally